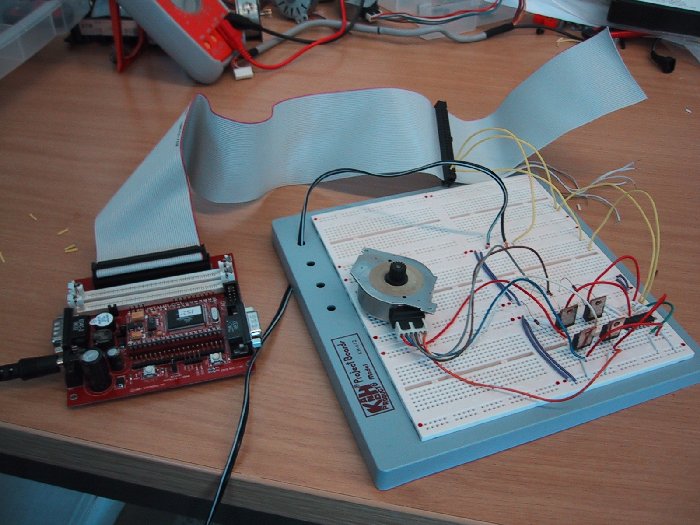
General view: you can see the Jstamp development station on the left. The stepper
motor has been scavenged on an old printer.
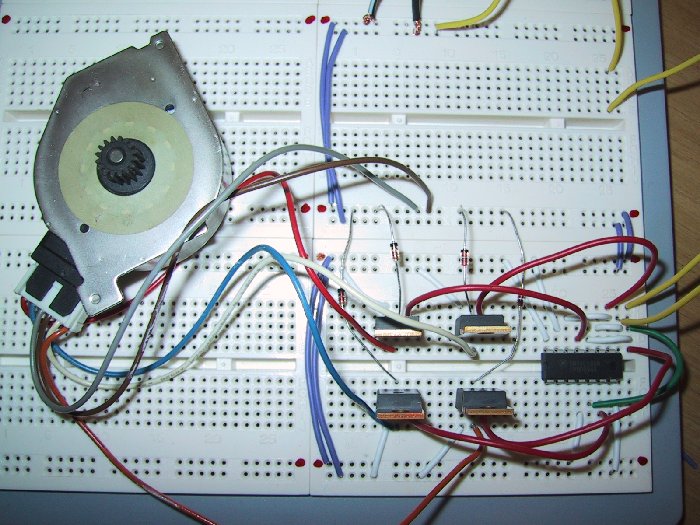
a close up of the protoboard...
At the beginning of the ROBOT project we intended to used stepper motors to move the robot. These motor have great precision but the torque is very low. We change our mind and use finally classical servo's. You can see here the preliminary test setup to evaluate performance of stepper motors.
General view: you can see the Jstamp development station on the left. The
stepper
motor has been scavenged on an old printer.
a close up of the protoboard...